Bu arduino eğitiminde size bu güzel görünümlü
radar projesinin Arduino kart ve PDE(İşleme Geliştirme Ortamı) kullanarak nasıl
yapılacağını göstereceğim. Daha fazla ayrıntı için aşağıdaki videoyu izleyebilir veya öğretici
yazıyı okuyabilirsiniz. Bu arduino projesi için tüm ihtiyacınız olan
nesneleri kontrol etmek için bir ulrasonik sensör, sensörü döndürmek için bir
mini hobi servo motor ve bunları kontrol etmek için bir arduino kart.
CİHAZ YAPIMI
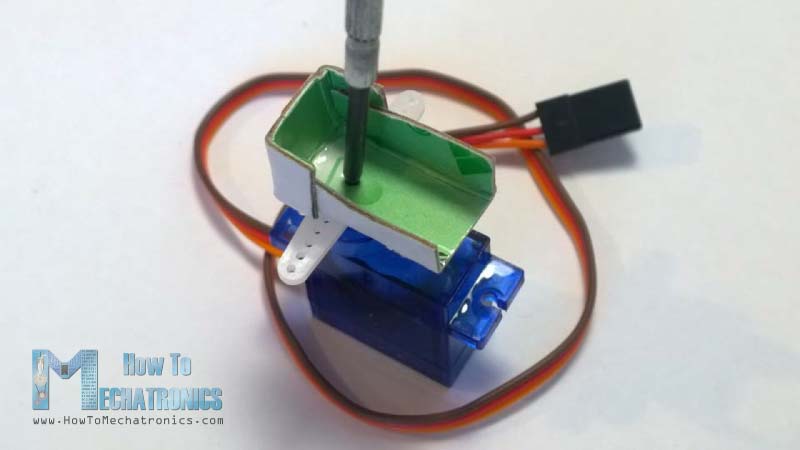
İlk olarak ultrasonik sensörü Arduino karta bağlamak için bir karton
stand yaptım. Aşağdaki resimde göründüğü gibi katladım, yapıştırdım ve bir vida
ile servo motora tutturdum.
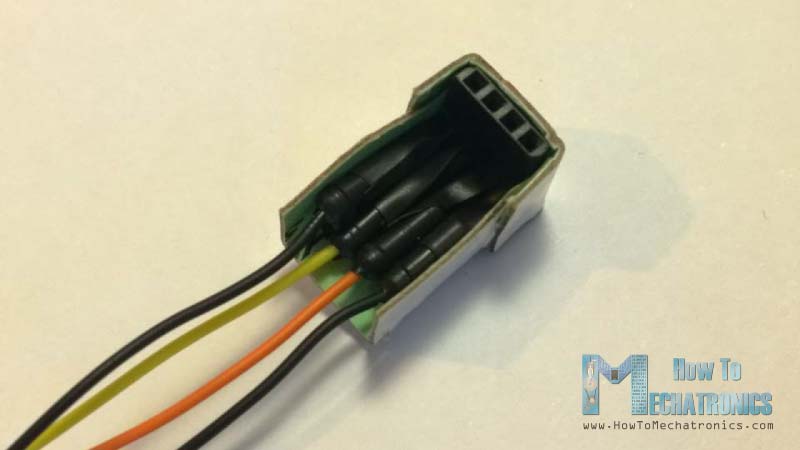
Ayrıca sensöre bağlamak için üzerine jumper kablo
lehimlenmiş olan 4 adet pin başlığı ekledim.
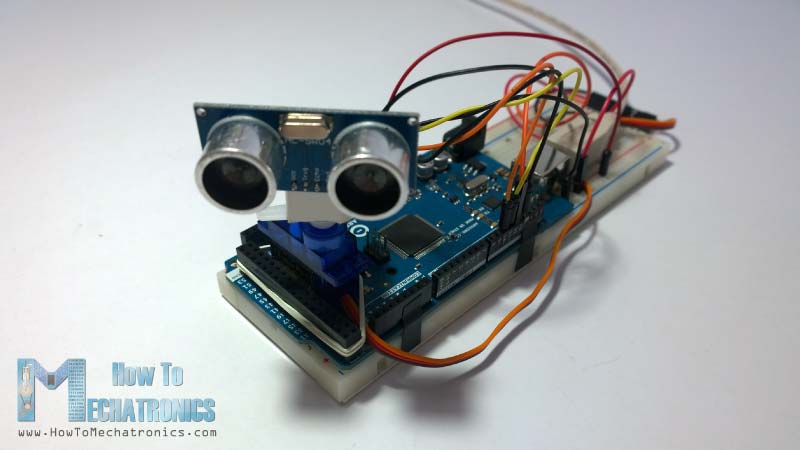
Son olarak servo motoru poşet lastiği kullanarak arduino karta bağladım.
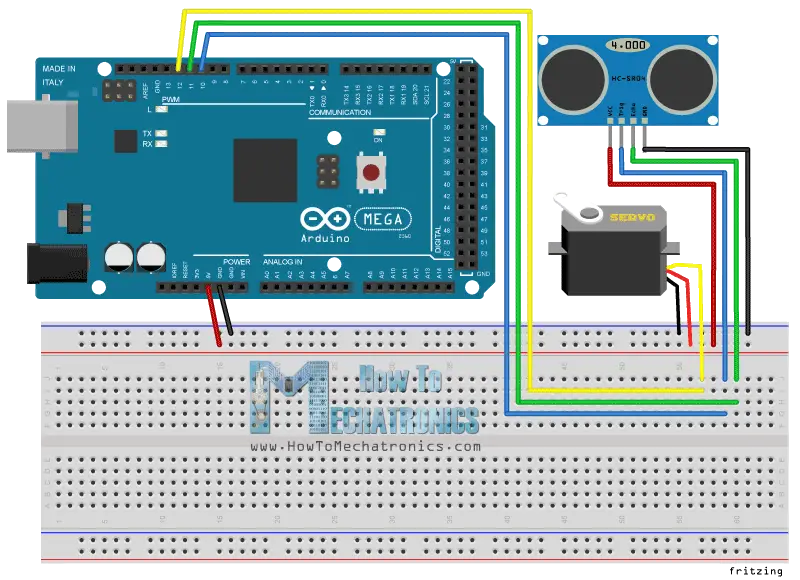
DEVRE ŞEMASI
HC-SR04 ultrasonik sensörü Arduino karrt’da 10 ve 11. pinlere ve servo
motoru 12. pine bağladım.
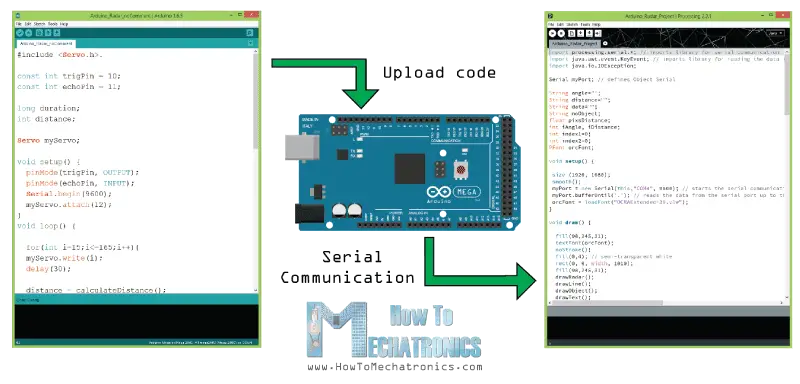
KAYNAK KODU
Şimdi Arduino karta IDE ile Arduino arasındaki etkileşimi sağlamak için
bir kod yazıp yüklemek gerekiyor.
İŞTE HER BİR SATIRI AÇIKLAMALI ARDUİNO KAYNAK KODU
- // Includes the Servo library
- #include <Servo.h>.
- // Defines Tirg and Echo pins of the Ultrasonic Sensor
- const int trigPin = 10;
- const int echoPin = 11;
- // Variables for the duration and the distance
- long duration;
- int distance;
- Servo myServo; // Creates a servo object for controlling the servo motor
- void setup() {
- pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
- pinMode(echoPin, INPUT); // Sets the echoPin as an Input
- Serial.begin(9600);
- myServo.attach(12); // Defines on which pin is the servo motor attached
- }
- void loop() {
- // rotates the servo motor from 15 to 165 degrees
- for(int i=15;i<=165;i++){
- myServo.write(i);
- delay(30);
- distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree
- Serial.print(i); // Sends the current degree into the Serial Port
- Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
- Serial.print(distance); // Sends the distance value into the Serial Port
- Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
- }
- // Repeats the previous lines from 165 to 15 degrees
- for(int i=165;i>15;i--){
- myServo.write(i);
- delay(30);
- distance = calculateDistance();
- Serial.print(i);
- Serial.print(",");
- Serial.print(distance);
- Serial.print(".");
- }
- }
- // Function for calculating the distance measured by the Ultrasonic sensor
- int calculateDistance(){
- digitalWrite(trigPin, LOW);
- delayMicroseconds(2);
- // Sets the trigPin on HIGH state for 10 micro seconds
- digitalWrite(trigPin, HIGH);
- delayMicroseconds(10);
- digitalWrite(trigPin, LOW);
- duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds
- distance= duration*0.034/2;
- return distance;
- }
Seri Port dan veri okuyan SerialEvent() fonksiyonu kullanılarak sensör Arduino
kart tarafından ölçülen açı ve mesafe değerlerini IDE içine alırız ve açı,
mesafe değerlerini iAngle ve iDistance
değişkenleri içine koyarız. Bu değişkenler radar çizimi, hatlar, nesne kontrolü
ve bazı metinler için kullanılıyor olacak.
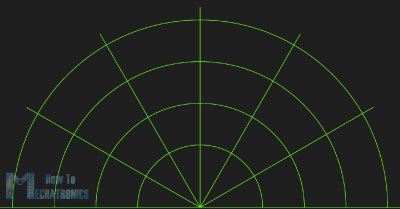
Radarı çizmek için bu fonksiyonu arc() ve line()fonksiyonundan oluşan
drawRadar() fonksiyonu yaptım.
void drawRadar() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
// draws the angle lines
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
}
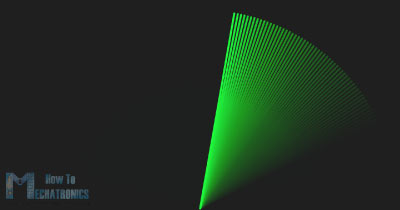
Radar boyunca hızla hareket eden bir çizgi çizmek için bu
fonksiyonu drawLine() yaptım. Dönme merkezi translate() fonksiyonu ile ayarlanır
ve line() fonksiyonu içinde kullanılan iAngle değişkeni her bir dereceyi
çizmek için bir çizgi olarak kullanılır.
- void drawLine() {
- pushMatrix();
- strokeWeight(9);
- stroke(30,250,60);
- translate(960,1000); // moves the starting coordinats to new location
- line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
- popMatrix();
- }
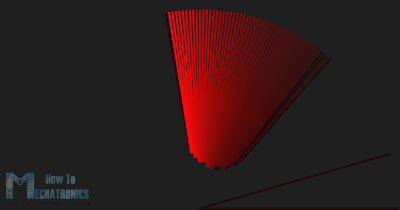
Tespit edilen nesnenin çizimi için drawObject() fonksiyonunu yaptım. Ultrasonik
sensörden mesafe alır, piksele dönüştürür ve sensör açısı ile birlikte radara
nesne çizer.
- void drawObject() {
- pushMatrix();
- translate(960,1000); // moves the starting coordinats to new location
- strokeWeight(9);
- stroke(255,10,10); // red color
- pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
- // limiting the range to 40 cms
- if(iDistance<40){
- // draws the object according to the angle and the distance
- line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
- }
- popMatrix();
- }
Ekranda metin için belirli yerlerde metinler çizen drawText()
fonksiyonunu yaptım.
Bütün bu fonksiyonlara kendini herzaman tekrarlayan, çizen ve ekrana
yazan ana draw() fonksiyonu denir.
Ayrıca burada hareket bulanıklığını taklit ve hareketli hattın yavaş
solması için 2 parametreli fill() fonksiyonunu kullandım.
- void draw() {
- fill(98,245,31);
- textFont(orcFont);
- // simulating motion blur and slow fade of the moving line
- noStroke();
- fill(0,4);
- rect(0, 0, width, 1010);
- fill(98,245,31); // green color
- // calls the functions for drawing the radar
- drawRadar();
- drawLine();
- drawObject();
- drawText();
- }
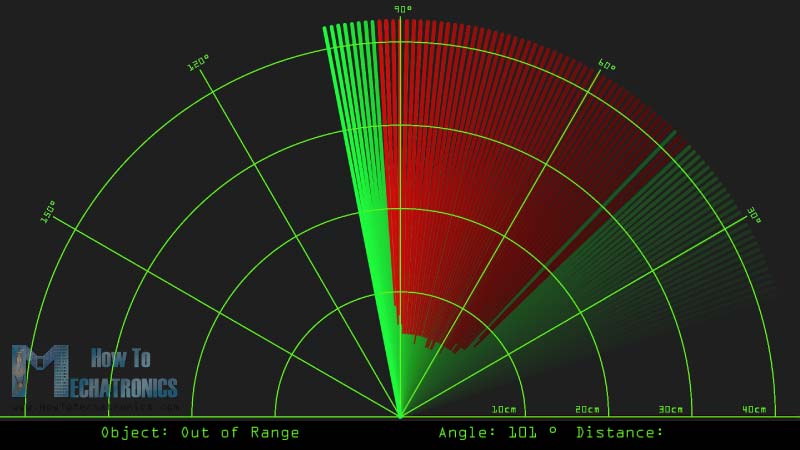
İşte radarın son görünümü.
İşte tamamlanmış Arduino Kaynak Kodu:
- import processing.serial.*; // imports library for serial communication
- import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
- import java.io.IOException;
- Serial myPort; // defines Object Serial
- // defubes variables
- String angle="";
- String distance="";
- String data="";
- String noObject;
- float pixsDistance;
- int iAngle, iDistance;
- int index1=0;
- int index2=0;
- PFont orcFont;
- void setup() {
- size (1920, 1080);
- smooth();
- myPort = new Serial(this,"COM4", 9600); // starts the serial communication
- myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
- orcFont = loadFont("OCRAExtended-30.vlw");
- }
- void draw() {
- fill(98,245,31);
- textFont(orcFont);
- // simulating motion blur and slow fade of the moving line
- noStroke();
- fill(0,4);
- rect(0, 0, width, 1010);
- fill(98,245,31); // green color
- // calls the functions for drawing the radar
- drawRadar();
- drawLine();
- drawObject();
- drawText();
- }
- void serialEvent (Serial myPort) { // starts reading data from the Serial Port
- // reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
- data = myPort.readStringUntil('.');
- data = data.substring(0,data.length()-1);
- index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
- angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
- distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
- // converts the String variables into Integer
- iAngle = int(angle);
- iDistance = int(distance);
- }
- void drawRadar() {
- pushMatrix();
- translate(960,1000); // moves the starting coordinats to new location
- noFill();
- strokeWeight(2);
- stroke(98,245,31);
- // draws the arc lines
- arc(0,0,1800,1800,PI,TWO_PI);
- arc(0,0,1400,1400,PI,TWO_PI);
- arc(0,0,1000,1000,PI,TWO_PI);
- arc(0,0,600,600,PI,TWO_PI);
- // draws the angle lines
- line(-960,0,960,0);
- line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
- line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
- line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
- line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
- line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
- line(-960*cos(radians(30)),0,960,0);
- popMatrix();
- }
- void drawObject() {
- pushMatrix();
- translate(960,1000); // moves the starting coordinats to new location
- strokeWeight(9);
- stroke(255,10,10); // red color
- pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
- // limiting the range to 40 cms
- if(iDistance<40){
- // draws the object according to the angle and the distance
- line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
- }
- popMatrix();
- }
- void drawLine() {
- pushMatrix();
- strokeWeight(9);
- stroke(30,250,60);
- translate(960,1000); // moves the starting coordinats to new location
- line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
- popMatrix();
- }
- void drawText() { // draws the texts on the screen
- pushMatrix();
- if(iDistance>40) {
- noObject = "Out of Range";
- }
- else {
- noObject = "In Range";
- }
- fill(0,0,0);
- noStroke();
- rect(0, 1010, width, 1080);
- fill(98,245,31);
- textSize(25);
- text("10cm",1180,990);
- text("20cm",1380,990);
- text("30cm",1580,990);
- text("40cm",1780,990);
- textSize(40);
- text("Object: " + noObject, 240, 1050);
- text("Angle: " + iAngle +" °", 1050, 1050);
- text("Distance: ", 1380, 1050);
- if(iDistance<40) {
- text(" " + iDistance +" cm", 1400, 1050);
- }
- textSize(25);
- fill(98,245,60);
- translate(961+960*cos(radians(30)),982-960*sin(radians(30)));
- rotate(-radians(-60));
- text("30°",0,0);
- resetMatrix();
- translate(954+960*cos(radians(60)),984-960*sin(radians(60)));
- rotate(-radians(-30));
- text("60°",0,0);
- resetMatrix();
- translate(945+960*cos(radians(90)),990-960*sin(radians(90)));
- rotate(radians(0));
- text("90°",0,0);
- resetMatrix();
- translate(935+960*cos(radians(120)),1003-960*sin(radians(120)));
- rotate(radians(-30));
- text("120°",0,0);
- resetMatrix();
- translate(940+960*cos(radians(150)),1018-960*sin(radians(150)));
- rotate(radians(-60));
- text("150°",0,0);
- popMatrix();
- }
Herhangi bir ekran çözünürlüğüne sığdırmak için kodun yeni güncellenmiş
versiyonu:
Sadece size() fonksiyonu içindeki değerleri ekran çözünürlüğünüz ile
değiştirin.
- /* Arduino Radar Project
- *
- * Updated version. Fits any screen resolution!
- * Just change the values in the size() function,
- * with your screen resolution.
- *
- * by Dejan Nedelkovski,
- * www.HowToMechatronics.com
- *
- */
- import processing.serial.*; // imports library for serial communication
- import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
- import java.io.IOException;
- Serial myPort; // defines Object Serial
- // defubes variables
- String angle="";
- String distance="";
- String data="";
- String noObject;
- float pixsDistance;
- int iAngle, iDistance;
- int index1=0;
- int index2=0;
- PFont orcFont;
- void setup() {
- size (1920, 1080); // ***CHANGE THIS TO YOUR SCREEN RESOLUTION***
- smooth();
- myPort = new Serial(this,"COM4", 9600); // starts the serial communication
- myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
- orcFont = loadFont("OCRAExtended-30.vlw");
- }
- void draw() {
- fill(98,245,31);
- textFont(orcFont);
- // simulating motion blur and slow fade of the moving line
- noStroke();
- fill(0,4);
- rect(0, 0, width, height-height*0.065);
- fill(98,245,31); // green color
- // calls the functions for drawing the radar
- drawRadar();
- drawLine();
- drawObject();
- drawText();
- }
- void serialEvent (Serial myPort) { // starts reading data from the Serial Port
- // reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
- data = myPort.readStringUntil('.');
- data = data.substring(0,data.length()-1);
- index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
- angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
- distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
- // converts the String variables into Integer
- iAngle = int(angle);
- iDistance = int(distance);
- }
- void drawRadar() {
- pushMatrix();
- translate(width/2,height-height*0.074); // moves the starting coordinats to new location
- noFill();
- strokeWeight(2);
- stroke(98,245,31);
- // draws the arc lines
- arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI);
- arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI);
- arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI);
- arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI);
- // draws the angle lines
- line(-width/2,0,width/2,0);
- line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
- line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
- line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90)));
- line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120)));
- line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150)));
- line((-width/2)*cos(radians(30)),0,width/2,0);
- popMatrix();
- }
- void drawObject() {
- pushMatrix();
- translate(width/2,height-height*0.074); // moves the starting coordinats to new location
- strokeWeight(9);
- stroke(255,10,10); // red color
- pixsDistance = iDistance*((height-height*0.1666)*0.025); // covers the distance from the sensor from cm to pixels
- // limiting the range to 40 cms
- if(iDistance<40){
- // draws the object according to the angle and the distance
- line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),(width-width*0.505)*cos(radians(iAngle)),-(width-width*0.505)*sin(radians(iAngle)));
- }
- popMatrix();
- }
- void drawLine() {
- pushMatrix();
- strokeWeight(9);
- stroke(30,250,60);
- translate(width/2,height-height*0.074); // moves the starting coordinats to new location
- line(0,0,(height-height*0.12)*cos(radians(iAngle)),-(height-height*0.12)*sin(radians(iAngle))); // draws the line according to the angle
- popMatrix();
- }
- void drawText() { // draws the texts on the screen
- pushMatrix();
- if(iDistance>40) {
- noObject = "Out of Range";
- }
- else {
- noObject = "In Range";
- }
- fill(0,0,0);
- noStroke();
- rect(0, height-height*0.0648, width, height);
- fill(98,245,31);
- textSize(25);
- text("10cm",width-width*0.3854,height-height*0.0833);
- text("20cm",width-width*0.281,height-height*0.0833);
- text("30cm",width-width*0.177,height-height*0.0833);
- text("40cm",width-width*0.0729,height-height*0.0833);
- textSize(40);
- text("Object: " + noObject, width-width*0.875, height-height*0.0277);
- text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277);
- text("Distance: ", width-width*0.26, height-height*0.0277);
- if(iDistance<40) {
- text(" " + iDistance +" cm", width-width*0.225, height-height*0.0277);
- }
- textSize(25);
- fill(98,245,60);
- translate((width-width*0.4994)+width/2*cos(radians(30)),(height-height*0.0907)-width/2*sin(radians(30)));
- rotate(-radians(-60));
- text("30°",0,0);
- resetMatrix();
- translate((width-width*0.503)+width/2*cos(radians(60)),(height-height*0.0888)-width/2*sin(radians(60)));
- rotate(-radians(-30));
- text("60°",0,0);
- resetMatrix();
- translate((width-width*0.507)+width/2*cos(radians(90)),(height-height*0.0833)-width/2*sin(radians(90)));
- rotate(radians(0));
- text("90°",0,0);
- resetMatrix();
- translate(width-width*0.513+width/2*cos(radians(120)),(height-height*0.07129)-width/2*sin(radians(120)));
- rotate(radians(-30));
- text("120°",0,0);
- resetMatrix();
- translate((width-width*0.5104)+width/2*cos(radians(150)),(height-height*0.0574)-width/2*sin(radians(150)));
- rotate(radians(-60));
- text("150°",0,0);
- popMatrix();
- }
Kaynak: howtomechatronics
Hiç yorum yok:
Yorum Gönder